Elaborazione digitale di immagini
26 Febbraio 2013
1-Immagini digitali
Un'immagine digitale in bianco nero può essere descritta da
una matrice $m\times n$
di pixel (contrazione di picture element). Il generico pixel
$p(i,j)$, il cui valore numerico può essere intero o
reale, fornisce la luminosità del punto di coordinate $(i,j)$
dell'immagine.
Formato PGM (Portable Gray
Map). Nella convenzione PGM il file che contiene le informazioni
sull'immagine è organizzato nel modo seguente:
P2
# eventuali commenti
numero_colonne, numero_righe
valore_livello_bianco
p(1,1)
p(1,2)
.
.
p(1,n)
p(2,1)
p(2,2)
.
.
dove:
P2, detto numero magico,
indica al sistema
che visualizzerà il file sullo schermo
che si tratta di una immagine bianco nero nel formato PGM
#
eventuali commenti sono commenti arbitrari preceduti
da #
numero_colonne e
numero_righe sono due
interi che determinano le dimensioni dell'immagine (matrice dei
pixel)
valore_livello_bianco
è un intero compreso tra 1 e 65536,
che determina il valore numerico del bianco
(generalmente 255), mentre il valore numerico del nero è 0.
p(i,j) sono i valori numerici
dei pixel (fra 0 e valore_livello_bianco) relativi alla posizione
$(i,j)$. Essi sono ordinati per righe.
Maggiori informazioni si trovano nel sito netpbm.sourceforge.net
Esistono diversi programmi per visualizzare un'immagine sullo
schermo di un computer, il più semplice è display.
Un pacchetto che permette di fare elaborazioni varie oltre che visualizzare una immagine è
gimp.
Ad esempio, se
immagine.pgm è il nome di un file che contiene un'immagine
codificata nel formato PGM, allora il comando
display immagine.pgm
mostra sullo schermo l'immagine corrispondente al file, mentre il comando
gimp immagine.pgm
lancia l'applicazione gimp visualizzando sullo schermo il contenuto di immagine.pgm.
Esempio di file PGM
P2
# esempio semplice
4,4
255
0
0
0
0
0
255
255
0
0
255
255
0
0
0
0
0
La stessa immagine poteva essere memorizzata come
P2
#
esempio semplice
4,4
255
0 0 0 0
0 255 255 0
0 255 255 0
0 0 0 0
File ASCII e file RAW
Un file PGM può essere
memorizzato nella modalità ASCII o nella modalità RAW.
Nella modalità ASCII il valore del generico pixel viene
scritto nella sua rappresentazione decimale con caratteri ASCII. Ad
esempio. se il valore del pixel è 123, vengono scritte le tre
cifre 1,2 e 3, consumando quindi tre byte di memoria, uno per
ciascuna cifra, più altri tre byte per gli spazi di
separazione. Nella rappresentazione RAW, il pixel il cui valore è
123 viene memorizzato con il singolo byte il cui valore è 123.
In questo modo un solo byte è sufficiente per ciascun pixel.
Nella rappresentazione RAW la stringa P2 va sostituita con P5. La
rappresentazione ASCII è più comoda perché
permette di essere visualizzata e manipolata più facilmente.
Ha lo svantaggio che è più ingombrante. Noi useremo la
rappresentazione ASCII.
L'applicazione Gimp di Linux permette di aprire un file
immagine in un qualsiasi formato e salvarla in un altro
formato diverso. Ad esempio, una fotografia digitale salvata come
file jpeg può essere aperta da Gimp e salvata come file PGM.
Un altro modo di convertire immagini da un formato ad un altro è
dato dal comando convert
presente in tutte le distribuzioni di linux.
Ad esempio,
convert foto.jpg foto.pgm
trasforma il file foto.jpg, contenente una fotografia nel formato jpeg, nel
file foto.pgm contenente la stessa immagine ma in b/n nel formato pgm.
Formato PBM (Portable Bit Map). È un formato analogo al PGM
dove il numero magico è P1 in modalità ASCII e P4 in
modalità raw, e dove i pixel possono assumere solo due valori 0 e 1
(nero e bianco). Manca quindi il valore della massima intensità del
bianco.
Immagini a colori, modalità
RGB ---
Formato PPM
Una immagine a colori può essere memorizzata mediante la
modalità RGB (Red, Green, Blue). In questo modo ad ogni pixel
viene assegnata una terna di numeri $r,g,b$, dove $r$ fornisce
l'intensità del rosso, $g$ l'intensità del verde e $b$
l'intensità del blu. Il file che viene costruito nel formato
PPM (Portable Pixel Map) è organizzato come segue
P3
# eventuali commenti
numero_colonne, numero_righe
massima_luminosità
r(1,1) g(1,1)
b(1,1)
r(1,2) g(1,2) b(1,2)
.
.
.
Ciò che cambia rispetto ad un file b/n è la prima
riga che contiene P3 a indicare che è un file a colori nella
modalità RGB e la presenza delle terne di pixel (un valore numerico per
ogni colore) anziché dei singoli valori. Le terne dei valori
rgb possono non stare sulla stessa riga ma essere distribuite su
righe consecutive. Nella codifica RAW la stringa P3 viene sostituita
da P6.
Maggior dettagli si trovano a
netpbm.sourceforge.net
Il formato PNM, acronimo di Portable aNy Map, è giusto
un'astrazione dei formati PBM, PGM, and PPM. Cioè il termine
PNM si riferisce collettivamente a PBM, PGM, e PPM.
Immagini in octave
Il linguaggio di programmazione Octave
permette in modo semplice di trasformare una matrice di numeri in una
immagine usando una logica simile a quella dello standard pnm. Octave
usa una mappa dei colori che è costituita da una matrice di $k$
righe e tre colonne. Per default $k=64$. Gli elementi di questa
matrice sono numeri compresi tra 0 e 1, ciascuna riga rappresenta un
colore composto da quantità di rosso, verde e blu date dai
valori presenti rispettivamente sulla prima, seconda e terza
colonna. Ad esempio una mappa del tipo
[1 0 0; 0 1 0; 0 0 1]
fornisce tre colori, nell'ordine: il rosso, il verde e il blu. Per
default la mappa dei colori contiene 64 tonalità di colore.
Per creare una mappa di grigi basta assegnare uguali quantità
di rosso, verde e blu a ciascun colore. Una mappa di 64 livelli di
grigio ha quindi per colonne
[0:1/63:1]'*[1 1 1].
Per poter cambiare la mappa dei colori basta dare il comando
colormap(nuovamappa);
dove nuovamappa
è la matrice con la nuova mappa dei colori.
Ad esempio per creare una mappa MP
che abbia i soli tre colori puri rosso, verde
e blu basta scrivere
MP=eye(3); colormap(MP);
Per tornare alla mappa default di 64 colori basta scrivere
colormap('default');
Per assegnare la mappa di colori corrente ad una matrice CM basta scrivere
CM = colormap;
Per poter visualizzare un'immagine in octave ci sono diversi
modi. Essi differiscono leggermente tra loro a seconda della versione
di Octave usata. Sulle macchine dell'aula M c'è la versione
2.9.19. Sulle macchine dell'aula 4 del dipartimento di
matematica c'è la versione 3.0.5. Si suggerisce l'uso del
comando "help" per avere informazioni sulla sintassi e sul
funzionamento di un qualsiasi comando Octave. Qui descriviamo i comandi nella versione 3.0.5.
Il comando image
Se la variabile A contiene una matrice di $m$ righe e $n$ colonne con
valori numerici A(i,j), il comando
image(A);
mostra
sullo schermo una immagine formata da $m\times n$ pixel dove la
luminosità e il colore del pixel di posizione (i,j) sono
determinati dal valore di A(i,j); più precisamente il colore
del pixel di posto $i,j$ è dato dal colore della mappa dei
colori presente sulla $q$-esima riga
di mappa dove $q$
è l'arrotondamento alla parte intera di A(i,j). Valori di
A(i,j) fuori dal segmento consentito corrispondono al primo e all'ultimo colore della mappa a seconda della parte del segmento in cui cade A(i,j).
Nello stesso comando si possono specificare gli estremi dell'asse x e
dell'asse y in modo che nell'immagine compaiano le coordinate. Per far
questo si usa
image con la sintassi
image([xmin xmax], [ymin ymax], A);
Ad esempio, il comando
colormap(eye(3));
A=[-1 0 1 2 3 4 ; -1 0 1 2 3 4];
image([-1 4], [0 1], A);
genera l'immagine
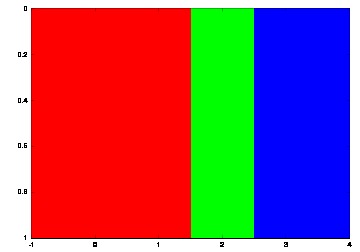
Si noti che tutti i valori degli elementi di A minori di 1/2 corrispondono al colore rosso (il primo della mappa dei colori) mentre i valori maggiori o uguali a a 2.5 corrispondono al colore blu (il terzo della mappa dei colori).
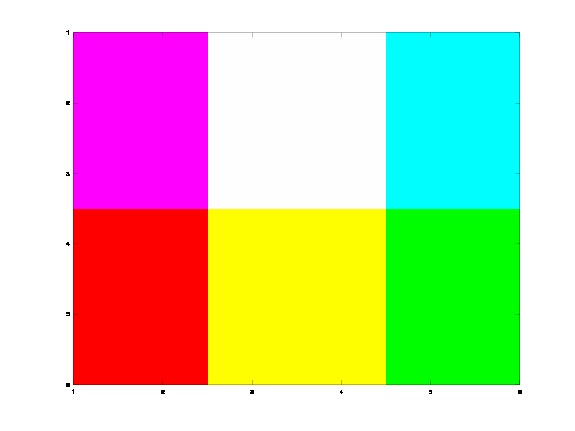
Il comando image può
prendere in input una matrice $m\times n\times 3$. In questo caso
l'immagine mostrata sullo schermo dipende dal numero di colori
presenti nella mappa ma è indipendente dalla particolare mappa
dei colori al momento in uso. I valori del rosso, verde e blu sono
dati dai valori numerici delle tre matrici A(:,:,1), A(:,:,2),
A(:,:,3). I valori minori o uguali a 0 corrispondono ad assenza di
colore, i valori maggiori o uguali a $c$ corrispondono alla massima
luminosità, dove $c$ è il massimo numero di colori nella
mappa corrente. Ad esempio avendo in uso la mappa default con 64 colori,
i comandi
r=zeros(6); g=zeros(6); b=zeros(6);
r(:,1:4)=64; g(:,3:6)=64; b(1:3,:)=64;
A(:,:,1)=r; A(:,:,2)=g; A(:,:,3)=b;
image(A);
generano la figura
Il comando imagesc
Il comando imagesc(A) ha lo
stesso effetto e la stessa sintassi
di image. L'unica differenza
è che gli elementi della matrice A vengono scalati in modo che
il minimo e il massimo corrispondano al minimo e massimo indice della
mappa dei colori. Se $A$ è $m\times n\times 2$ allora i valori
degli elementi di A vengono scalati in modo da rientrare nel segmento
[0 64].
Apparentemente nella versione 2.9.19 di Octave non ci
sono differenze di comportamento tra i
comandi image
e imagesc.
Il comando imshow
Se la variabile A
contiene una matrice di $m$ righe e $n$ colonne con valori
numerici A(i,j), il comando
imshow(A, mappa);
mostra
sullo schermo una immagine formata da $m\times n$ pixel dove la
luminosità e il colore del pixel di posizione $(i,j)$ sono
determinati dal valore di A(i,j); più precisamente il colore
del pixel di posto $i,j$ è dato dal colore della mappa dei
colori presente sulla $q$-esima riga
di mappa dove $q$ è la
parte intera di A(i,j). come nel
comando image.
Se la
seconda variabile non viene data allora si assume che la mappa dei
colori sia quella dei grigi che viene anche scelta come mappa default.
Provate a vedere cosa succede scrivendo
A=3*rand(200); imshow(A,eye(3));
Se A è una matrice $m\times n\times 3$ allora imshow(A)
mostra una immagine le cui componenti di rosso, verde e blu sono
date rispettivamente da A(:,:,1), A(:,:,2) e A(:,:,3) come nel caso del comando
image
.
Esempio 1.
Il comando
imshow(rand(20,20,3));
visualizza una immagine a colori $20\times 20$ i cui pixel hanno una quantità
casuale di rosso, verde e blu. Un'immagine analoga si ottiene col comando
image(rand(20,20,3));
Il programma Octave seguente costruisce
un'immagine n×n
con valori di grigio che sfumano da nero a bianco secondo la regola
A(i,j)=i+j, e dove 2 corrisponde a nero e 2n
a bianco.
function grigi (n)
a = zeros(n);
for i = 1 : n
for j = 1 : n
a(i,j) = i + j;
endfor
endfor
colormap([0:1/63:1]'*[1 1 1]);
imagesc(a);
endfunction
L'immagine che si ottiene in questo modo è la seguente:

Provate a lanciare il gomando grigi(100)
e poi guardate come cambia la figura col comando
mappa=rand(200,3);colormap(mappa);
Provate ancora a sostituire l'istruzione
a(i,j) = i + j;
con l'istruzione
a(i,j) = i * j;
e ancora guardate come cambia l'immagine col comando
colormap(mappa);. Provate separatamente queste altre scelte e motivate la variazione dell'immagine
a(i,j) = (i + j)*rand;
a(i,j) = i*j*rand;
Osserviamo che la costruzione col doppio ciclo for
per assegnare i valori i+j, oppure i*j alla matrice
a può essere sostituita dai comandi più semplici e più efficienti
a=[1:n]'*ones(1,n)+ones(n,1)*[1:n];
e, rispettivamente
a=[1:n]'*[1:n];
Osserviamo che la function grigi permette di tracciare le linee di livello della funzione che abbiamo assegnato alla matrice a(i,j). Proviamo ad esempio a considerare la funzione $\cos(x)\cos(y)$ per $x$ e $y$ compresi tra zero e pigreco. Poniamo allora
a(i,j) = cos(pi*i/n)*cos(pi*j/n);
lanciamo grigi(200);
e poi mappa=rand(10,3);colormap(mappa);
In questo modo vengono evidenziate 10 linee di livello.
Se vogliamo creare un file che contiene i dati di questa
immagine nel formato pgm basta inserire nella function precedente i
seguenti comandi:
fid = fopen('grigi.pgm', 'w');
fprintf(fid,'P2\n');
fprintf(fid, '%d , %d \n', n, n);
fprintf(fid, '255\n');
for i = 1 : n
for j = 1 : n
fprintf(fid, '%d\n', a(i,j) );
endfor
endfor
Il comando fopen di
Octave apre un file per la lettura/scrittura la sintassi è
fid=fopen(nomefile, modo) dove
nomefile è
una stringa col nome del file che si vuole aprire,
modo
è una stringa che contiene la modalità di apertura, in
particolare:
'w' write (file di
scrittura)
'r' read (file di
lettura)
la variabile fid
prende come valore un numero intero che servirà a identificare
il file di lettura/scrittura. Infatti, l'istruzione
fprintf(fid, 'scrivo %d', n);
scrive il valore intero della variabile
n
preceduto dalla parola scrivo. La
sintassi per i formati di scrittura è la stessa del linguaggio
C.
1.1-Immagini
create dai numeri primi: la spirale di Ulam
Immagini interessanti possono essere
costruite per evidenziare proprietà dei numeri primi
Esempio 2. Costruiamo una immagine $n\times n$
tale che il pixel di posto $(i,j)$ sia bianco se
$n(i-1)+j$
è un numero primo, sia nero altrimenti. Per questo ci occorre
una funzione che dato un intero $p$ ci dice se $p$ è
primo o no.
function evidenzia_primi(n)
imag = zeros(n);
for i = 1 : n
for j = 1 : n
imag(i,j)=primo(n*(i-1)+j);
endfor
endfor
imagesc(imag);
endfunction
function v = primo(p)
v=1;
for i = 2 : sqrt(p)
if mod(p,i)==0
v = 0;
break;
endif
endfor
endfunction
La figura che si ottiene con $n=100$ è
la seguente

Esaminate le tre immagini che si ottengono con $n=119$, $n=120$, $n=121$. Sapete spiegare il perché di quelle configurazioni particolari?
Un pochino più complicato, ma vale
la pena farlo, è numerare i pixel lungo una spirale che si
dipana dal centro del quadrato, partendo dal numero 1

e accendere i pixel che corrispondono ai
numeri primi. In questo modo si ottiene la spirale
di Ulam.

Osservate che i numeri primi sembrano addensarsi maggiormente lungo delle
rette inclinate di un angolo di 45 gradi. È questo un effetto ottico
o è qualcosa che evidenzia una qualche proprietà nascosta?
Una discussione su questa domanda si può trovare su Wikipedia
http://en.wikipedia.org/wiki/Ulam_spiral
Per realizzare questa immagine ci costruiamo prima una function che
dispone i numeri naturali in una matrice $(2m+1)\times(2m+1)$ partendo dal centro,
cioè dall'elemento di posto $(m,m)$ e muovendosi a spirale che si dipana
in senso antiorario compiendo $m$ giri.
Per capire come procedere facciamo riferimento alla seguente figura

Si è colorato il primo giro di giallo, il secondo di rosa e il terzo di
oro. Ciascun giro è ripartito in quattro tratti: un tratto a salire, uno di movimento a
sinistra, uno a scendere ed uno di movimento a destra.
La function che fa questo è
descritta di seguito:
function s = spirale(m)
% Costruisce la matrice s di dimensione 2m+1 che contiene i
% numeri interi positivi a partire dal centro a spirale antioraria
s = zeros(2*m+1);
i = m+1; j=m+1;
k = 1;
s(i,j) = k;
for giri = 1:m % conta i giri della spirale
k = k+1;
j = j+1;
s(i,j)=k;
for t = 1:2*giri-1 % sale
k = k+1;
i = i-1;
s(i,j) = k;
endfor
for t = 1:2*giri % sinistra
k = k+1;
j = j-1;
s(i,j) = k;
endfor
for t = 1:2*giri % basso
k = k+1;
i = i+1;
s(i,j) = k;
endfor
for t = 1:2*giri % destra
k = k+1;
j = j+1;
s(i,j) = k;
endfor
endfor
endfunction
I quattro tratti in cui abbiamo spezzato la numerazione degli interi lungo la spirale
sono evidenziati con commenti nel programma. Osservate che la
variabile giri conta i giri della
spirale intorno al suo centro, e per ciascun giro si percorrono i
quattro lati. La variabile k contiene il valore dell'intero
da depositare nella casella corrente della spirale.
Un programma che genera la spirale di Ulam è il seguente
function a = spirale_di_ulam(m)
a = zeros(2*m + 1);
s = spirale(m);
for i = 1 : 2*m + 1
for j = 1 : 2*m + 1
if primo(s(i,j))
a(i,j) = 1;
endif
endfor
endfor
endfunction
Il linguaggio Octave, essendo interpretato, ha tempi di
elaborazione molto elevati. In particolar modo questo succede in
presenza di cicli for annidati. Usando i programmi scritti sopra
siamo in grado di
trattare dimensioni relativamente basse e quindi possiamo creare solo
immagini piccole.
Per poter svolgere elaborazioni a dimensione più ampia occorre
implementare questi algoritmi con linguaggi più efficienti tipo
il linguaggio C o il Fortran 90. Una alternativa possibile è
usare ancora Octave evitando però di usare cicli for annidati
e utilizzando il più possibile istruzioni "vettoriali", cioè
istruzioni che anziché operare sulle singole componenti di un vettore o
di una matrice agiscono simultaneamente su porzioni del vettore o della
matrice stessa. Mostriamo un esempio di ciò nell'implementazione del
crivello di Eratostene.
Crivello di Eratostene. Il crivello di Eratostene è un metodo
per selezionare i numeri primi compresi tra 1 ed $n$, dove $n$ è un intero
positivo assegnato. Il metodo funziona così: dalla lista degli interi
da 1 a $n$ si toglie il numero 1, poi tutti i multipli interi di 2, escluso
naturalmente 2, poi tutti i
multipli interi di 3 escludendo 3, e così via fino ad arrivare a
togliere i multipli del più grande intero minore o uguale alla radice
quadrata di $n$. Alla fine rimangono i numeri primi. Questo metodo può
essere implementato partendo dal vettore di tutti uni
e azzerando le componenti che hanno indice non primo
in modo che alla fine il vettore ottenuto conterrà il valore 1 in
corrispondenza delle componenti di indice primo e zero altrimenti.
Di questo metodo proponiamo due implementazioni una di tipo sequenziale che
usa cicli for, e quindi più lenta, e l'altra di tipo
vettoriale e quindi più veloce.
function primi=crivello0(n)
% Calcola i numeri primi da 1 a n col crivello di Eratostene
% versione sequenziale
primi=ones(1,n);
primi(1)=0;
m=round(sqrt(n));
for i=2:m
for j=2:n/i
primi(i*j)=0;
endfor
endfor
endfunction
function primi = crivello(n)
% Calcola i numeri primi da 1 a n col crivello di Eratostene
% versione vettoriale
primi = ones(1,n);
m=round(sqrt(n));
primi(1) = 0;
for i = 2:m
primi(2*i:i:n) = 0;
endfor
endfunction
La spirale di Ulam può essere generata in modo più efficiente
in questo modo
function z = ulam(n)
% Disegna la spirale di Ulam di dimenione 2n+1
% e fornisce in uscita la matrice relativa
s = spirale(n);
m = max(max(s));
c = crivello(m);
z = c(s);
imagesc(z);
endfunction
Una caratteristica importante di Octave è data dall'istruzione
z=c(s); in cui viene fornita in uscita
la matrice il cui elemento di posto $(i,j)$ è dato da
$c(s(i,j))$. Cioè il vettore $c$, inteso come funzione definita
sull'insieme $\{1,2,...,m\}$ a valori in $\{0,1\}$, viene composto con la
matrice $s$ intesa come
applicazione definita su $\{1,2...,2n+1\}\times\{1,2,...,2n+1\}$ a valori in $\{1,2,...,m\}$.
Esercizio 1. Dare una versione vettoriale, basata sul crivello di
Eratostene, del programma che crea un'immagine in cui il pixel di posto $(i,j)$
è bianco se il numero $n(i-1)+j$ è primo, altrimenti è nero.
[Aiuto: costruire una matrice $S$ il cui elemento di posto $(i,j)$ è
$j+ n(i-1)$ e calcolare $c(S)$ dove $c$ è il vettore dato dal crivello di
Eratostene. Per calcolare $S$ si scriva $S$ come somma $P+Q$ dove $P=$ones(n,1)*[1:n];
e $Q$ è data da ....]
Esercizio 2. Evidenziare le coppie di numeri interi $(p,q)$
tali che $p^2+q^2$ è un numero primo. Per questo create
una immagine di dimensione $n\times n$ in cui il pixel di posto $(p,q)$ è
bianco se $p^2+q^2$ è primo, nero altrimenti. Dare anche una versione
vettoriale del programma. [Aiuto: per la versione vettoriale costruire una
matrice $S$ che abbia nel posto $(p,q)$ l'elemento $p^2+q^2$ e si calcoli $c(S)$. Per il calcolo di $S$ si proceda come nell'esercizio 1]
Esercizio 3. Evidenziare le coppie di numeri interi $(p,q)$
tali che $|p^2-q^2|+k$ è un numero primo. Per questo create
una immagine di dimensione $n\times n$ in cui il pixel di posto $(p,q)$ è
bianco se $|p^2-q^2|+k$ è primo, nero altrimenti, dove $k=1$, $k=2$, $k=3$.
Dare anche una versione
vettoriale del programma.
Esercizio 4. Evidenziare le coppie di numeri interi $(p,q)$ tali
che $|p^2-q^2|+k$ è un numero primo sia per $k=1$ che per $k=3$.
Per questo create una immagine di
dimensione $n\times n$ in cui il pixel di posto $(p,q)$ è bianco se
$|p^2-q^2|+k$ è primo, sia per $k=1$ che per $k=3$, è nero altrimenti.
Dare anche una versione vettoriale del programma.
Esercizio 5. Evidenziare le coppie di numeri interi $(p,q)$
tali che $pq+1$ è un numero primo. Per questo create
una immagine di dimensione $(2m+1)\times(2m+1)$,
dove $m$ è un intero assegnato ad esempio $m=100$, e
accendete il pixel in posizione $(i,j)$ se
$|(i-m)(j-m)|+1$ è
primo. In quest'ultimo caso si ottiene

Guardando attentamente questa immagine si riescono a evidenziare
particolari forme geometriche.
Esercizio 6. Evidenziare le coppie $(p,q)$ di numeri primi
consecutivi (primi gemelli) usando la spirale di Ulam, colorando di rosso i
numeri primi gemelli e di verde gli altri numeri primi.
Esercizio 7. Numerare gli elementi di una matrice a partire da quello
in posizione (1,1) e procedendo a zig-zag: (1,1), (1,2), (2,1), (3,1), (2,2),
(1,3), (1,4), (2,3), (3,2), (4,1), ... ed accendere i pixel di un'immagine
relativi alle coppie $(i,j)$ che corrispondono a numeri primi.
Esercizio 8. Studiare graficamente come sono distribuiti i numeri primi della forma $pq+p+q+k$ con $k=0,1,2,3,4$.
1.2- Bacini di attrazione
Talvolta è utile studiare la dinamica delle successioni generate da
espressioni del tipo
\[
z_{k+1} = g(z_k)
\]
al variare del valore iniziale $z_0$. Questo capita ad esempio quando
la successione viene costruita per calcolare i punti fissi della funzione $g(x)$
definita sul piano complesso. Un esempio classico è dato dal metodo di
Newton applicato all'equazione $x^3 - 1 = 0$ che fornisce l'iterazione
\[
z_{k+1}=z_k-(z_k^3-1)/(3z_k^2)
\]
Le successioni generate in questo modo possono convergere a ciascuno dei tre
zeri del polinomio $x^3-1$ o possono divergere. È allora interessante
individuare per quali valori di $z_0$ la successione converge a 1, per
quali valori la successione converge a $-1/2 + {\bf i} \sqrt 3/2$ e per quali valori la
successione converge a $-1/2 -{\bf i} \sqrt 3/2$, dove $\bf i$ è
l'unità immaginaria.
Si riportano qui sotto gli zeri del polinomio $x^3-1$.

Proviamo a creare una immagine che rappresenti una porzione del piano
complesso, ad esempio di centro 0 e semilato 1, in cui il generico pixel viene
colorato di rosso se il corrispondente numero complesso assegnato a
$z_0$ genera una successione che converge a 1, di verde se la successione converge a $-1/2+{\bf i} \sqrt 3/2$, di blu se converge a $-1/2-{\bf i}\sqrt 3/2$ e
di nero se la successione non converge. Naturalmente dobbiamo dare un numero
massimo di passi oltre il quale si assume che non ci sia convergenza se il
valore corrente $x_k$ non si trova in un intorno sufficientemente piccolo di
uno degli zeri.
Procediamo inizialmente nel modo seguente per creare una immagine di
$(2m+1)\times(2m+1)$ punti, dove $m$ è un intero assegnato.
Poniamo $h=1/m$ e consideriamo
una griglia di $(2m+1)\times(2m+1)$
punti $w_{i,j}$ nel quadrato $[-1,1]\times[-1,1]$
del piano complesso definiti da $w_{i,j}
=(j+{\bf i}i)h$,
$i=-m,m$, $j=-m,m$.

Associamo ad ogni $w_{i,j}$ il pixel di posto $(i,j)$
di una immagine
$(2m+1)\times(2m+1)$.
Posto $z_0=w_{i,j}$ consideriamo
la successione $z_k$ generata dal metodo di
Newton e coloriamo rispettivamente di rosso verde e blu il pixel di posto
$(i,j)$ che
corrisponde al punto $w_{i,j}$ se la successione
$z_k$ converge a $x_1=1$,
$x_2=-1/2+{\bf i}\sqrt 3/2$,
$x_3=-1/2-{\bf i}\sqrt 3/2$ che sono le tre radici del polinomio $z^3-1$.
Per fare questo eseguiamo 20 passi del metodo di Newton e controlliamo
se $z_k$ dista meno di 1/10000 rispettivamente da
$x_1$, $x_2$, $x_3$.
Un programma che realizza questo è riportato di seguito
function a = newton(m)
maxit = 20;
% zeri del polinomio
x1 = 1;
x2 = -0.5+I*sqrt(3)/2;
x3 = -0.5-I*sqrt(3)/2;
a = 4*ones(2*m+1);
h = 1/m;
for i = -m : m
for j = -m:m
z = (j+i*I)*h;
% itera
for k = 1 : maxit
z = g(z);
endfor
% colora
if abs(z-x1)<1.0e-4
a(m+i+1,m+j+1) = 1;
endif
if abs(z-x2)<1.0e-4
a(m+i+1,m+j+1) = 2;
endif
if abs(z-x3)<1.0e-4
a(m+i+1,m+j+1) = 3;
endif
endfor
endfor
mappa = [1 0 0; 0 1 0; 0 0 1; 0 0 0];
colormap(mappa);
imshow(a,mappa);
endfunction
function y = g(z)
y = 0;
if z!=0
y = z - (z^3 - 1)/(3*z^2);
endif
endfunction
Naturalmente il programma scritto in questo modo è particolarmente
lento a causa dei vari cicli for annidati.
Un modo per vettorizzare il programma di
sopra è il seguente
function a = newton1(m)
% zeri del polinomio
x1 = 1;
x2 = -0.5+I*sqrt(3)/2;
x3 = -0.5-I*sqrt(3)/2;
maxit = 20;
range = -2:2/m:2;
n = 2*m+1;
z = ones(n,1)*range + I*range'*ones(1,n);
% itera simultaneamente su tutti i punti
z = z + 1.e-16; % per evitare lo zero
for k = 1 : maxit
y = z.*z;
zz = z - (z.*y - ones(n))./(3*y);
endfor
b = zeros(3,n,n);
b(1,:,:) = z-x1; % sottrae x1 a tutte le componenti di z
b(2,:,:) = z-x2; % sottrae x2 a tutte le componenti di z
b(3,:,:) = z-x3; % sottrae x3 a tutte le componenti di z
[valori, posizioni] = min(abs(b));
a = reshape(posizioni, [n n]); %
endfunction
Si osservi l'uso dell'operatore ".*" che usato con due matrici calcola il prodotto componente a
componente. Analogamente l'operatore "./" applicato a due matrici svolge
la divisione componente a componente.
Si osservi ancora che per estrarre l'informazione sulla avvenuta convergenza
alle soluzioni si usa una matrice a tre indici a(:,:,:) costituita da tre
"fette": la prima contiene la matrice x-x1, la seconda x-x2, la terza x-x3.
Il comando
[valori, posizioni]=min(abs(b)); dà una matrice
$1\times n\times n$ tale che posizione(1,i,j) vale $1,2$ o $3$ a seconda
che il minimo su $k$ di abs(b(k,i,j)) sia preso per $k=1,2$ o $3$.
Cioè vale $1,2$ o $3$ a seconda che $z(i,j)$ sia più
vicino a x1, x2 o x3. Il comando reshape(posizioni, [n n]) riorganizza
la matrice a tre indici posizioni come una matrice a due indici
$n\times n$.
Esercizio 1. Si modifichi la function newton1
in modo da prendere in
input, oltre che alla dimensione $m$, il centro $c$ (numero complesso) e il
semilato $L$ in modo che venga rappresentata nell'immagine la porzione di piano
racchiusa dal quadrato centrato in $c$ e di semilato $L$.
Esercizio 2. Si modifichi la function newton1 in modo da colorare
i pixel in base al minimo numero di passi sufficienti
affinché $|z_k -
z_{k-1}|\lt 1/10000$, indipendentemente dal valore del limite.
[Aiuto: siano Z e W le matrici col valore corrente e il valore successivo
al generico passo dell'iterazione; si consideri la matrice
H=abs(W-Z) > 1.0e-4 che in posizione $(i,j)$ contiene 1 se la
componente di posto $(i,j)$ di abs(W-Z) è maggiore di
1.0e-4, contiene zero altrimenti; si accumuli in una variabile S
la somma delle H]
Esercizio 3.
Scrivere una function vettorizzata che crea
immagine con colori rosso,
verde e blu di diversa intensità in base al numero di iterazioni, dove
il colore è scelto in base al valore del limite della successione generata.
Esercizio 4. Creare
una analoga function che crea un file PNM corrispondente all'immagine
dell'esercizio precedente.
Si dia una
colorazione ancora diversa assegnando la quantità r,g,b di rosso,
verde e blu in funzione del numero di iterazioni mediante tre
funzioni diverse, ad esempio $r=1231 k$ mod $256$, $g=2753 k$
mod $256$, $b=3127 k$ mod $256$.
Esercizio 5. Si creino i bacini di attrazione per il metodo di Newton
applicato alle tre equazioni equivalenti:
$x^2 - x^{-1} = 0$,
$x - x^{-2} = 0$,
$1 - x^{-3} = 0$.
Ecco alcune immagini così ottenute
Equazione $x^3-1=0$

Equazione $x^2-x^{-1}=0$

Equazione $x-x^{-2}=0$

Equazione $1-x^{-3}=0$

È possibile creare dei filmati
come il seguente che traccia i bacini di attrazione del metodo di
Newton applicato all'equazione $x^p-1=0$ con $p$ che varia tra 3 e 4. Il
filmato è stato creato da uno studente del corso a.a.
2008-2009.

Esercizio 6. Si consideri il polinomio
$1000x^4-10000x^3-x+1$ che ha tre zeri di modulo 1/10 e uno
zero uguale ad 1. Si costruiscano le immagini relative ai bacini di
attrazione del metodo di Newton applicato alle funzioni
$1000x^4-10000x^3-x+1$
$1000x^3-10000x^2-1+x^{-1}$
$1000x^2-10000x-x^{-1}+x^{-2}$
$1000x-10000-x^{-2}+x^{-3}$
$1000-10000x^{-1}-x^{-3}+x^{-4}$
1.3- L'insieme di Mandelbrot e gli
insiemi di Julia
L'insieme dei numeri complessi $c$ per cui la successione generata da
\[\begin{array}{l}
z_{k+1} = z_k^2 + c \\
z_0 = 0
\end{array}
\]
rimane limitata
è chiamato insieme di Mandelbrot. Per avere un'idea di come questo
insieme è fatto possiamo costruire una immagine corrispondente ai punti
del piano complesso che stanno nel quadrato di centro 0 e semilato 2,
in cui il pixel in
posizione $(i,j)$ è colorato di nero se il corrispondente numero complesso c sta
nell'insieme di Mandelbrot, e viene invece colorato con il q-esimo colore
della tavola dei colori se $z_q$ è
il primo valore della
successione il cui modulo è maggiore di 2.
Esercizio 7. Si scriva una function in Octave che disegna la porzione
della figura di
Mandelbrot in un quadrato di centro e semilato assegnati nel seguente modo:
si svolgono $q=50$ iterazioni e per ogni coppia $(i,j)$ si calcola il numero di
passi $k$ che occorrono affinché $z_k$ abbia modulo maggiore di
2; si colora il pixel di posto $(i,j)$ col $k$-esimo colore della tavola dei
colori; se dopo $q$ iterazioni il modulo di $x_q$ è minore di 2
si colora il pixel $(i,j)$ col colore $q$-esimo della tavola dei colori.
Dare una versione vettorizzata della function.
Fissato un valore di $c$, l'insieme dei punti $z_0$ tali che la
successione $z_k$ non diverge è chiamato insieme di Julia.
Esercizio 8. Si scriva una function in Octave che, dato $c$, traccia
l'insieme di Julia relativo ad una porzione del piano di centro e semilato
assegnati. Dare una versione vettorizzata della function.
Compito 1 Esercizio 7
Compito 2 Esercizio 8
Compito 3 Il polinomio $p(x)=x^5-(100x-1)^3$ ha tre radici molto vicine
a 1/100. Scrivere una
function che traccia i bacini di attrazione del metodo di Newton applicato all'equazione $p(x)=0$
nel quadrato di centro $1/100$ e semilato $d$. Trovare valori sufficientemente piccoli di
d che evidenzino i tre bacini di attrazione. Spedire il valore di $d$ e la function.
Compito 4 Svolgere il compito 3 con la funzione $p(x)=x^2-(100-1/x)^3$.
Compito 5 Svolgere il compito 3 con la funzione $p(x)=1-x^{-2}(100-1/x)^3$.
Compito 6 Svolgere il compito 3 con la funzione $p(x)=x-x^{-1}(100-1/x)^3$.
Compito 7 Svolgere il compito 3 con la funzione $p(x)=x^4-x^{-1}(100x-1)^3$.
Compito 8 Svolgere il compito 3 con la funzione $p(x)=x^3-x^{-2}(100x-1)^3$.
2-Manipolazioni geometriche.
È possibile ruotare una immagine attorno al pixel di
coordinate $(i_0,j_0)$ di un angolo $\alpha$
in senso antiorario
semplicemente applicando una
rotazione alle coordinate di ciascun pixel.
Prima di vedere questo, osserviamo che nella nostra notazione "matriciale" la
coppia $(i,j)$ denota l'elemento della riga $i$ e della colonna $j$, per cui
è come avere messo l'origine degli assi nell'angolo in alto a sinistra
dell'immagine col primo asse che punta verso il basso e il secondo che punta a
destra. Detto questo, ricordiamo che le coordinate del punto $P'=(x',y')$
ottenuto ruotando attorno a $(x_0,y_0)$ di un angolo $\alpha$ in senso antiorario
il punto $P$ di coordinate $(x,y)$ sono
\[\begin{array}{l}
x' - x_0 = (x-x_0)\cos(\alpha) - (y-y_0)\sin(\alpha)\\
y' - y_0 = (x-x_0)\sin(\alpha) + (y-y_0)\cos(\alpha)
\end{array}
\]
Quindi, si ottiene
\[\begin{array}{l}
i' - i_0 = (i-i_0)\cos(\alpha) - (j-j_0)\sin(\alpha)\\
j' - j_0 = (i-i_0)\sin(\alpha) + (j-j_0)\cos(\alpha)
\end{array}
\]
Osserviamo che se $(i,j)$ è una coppia di interi non è detto che
$(i',j')$ sia ancora una coppia di interi.
Per meglio descrivere la function di rotazione denotiamo con
$A=(a_{i,j})$ la matrice corrispondente all'immagine di partenza, e con
$B=(b_{i,j})$ la matrice corrispondente all'immagine ruotata.
Allora, per eseguire la rotazione in
modo più efficace, scandiamo tutte le coppie intere $(i',j')$
corrispondenti ai pixel del supporto dell'immagine ruotata, applichiamo la
trasformazione inversa ottenendo la coppia $(i,j)$, non necessariamente intera,
e andiamo a riempire l'elemento $b_{i',j'}$ col valore di
$a_{[i],[j]}$, dove $[i]$ e $[j]$ denotano gli arrotondamenti di $i$ e $j$ alla
parte intera. Può accadere che la coppia $([i],[j])$ non stia nel
supporto dell'immagine, cioè che $[i]$ non sia compreso tra $1$ e $n$, e $[j]$
non sia compreso tra $1$ e $m$. In tal caso assegnamo a $b_{i',j'}$ il
valore $0$.
Scriviamoci qui sotto le formule inverse della rotazione cioè
\[\begin{array}{l}
i - i_0 = (i'-i_0)\cos(\alpha) + (j'-j_0)\sin(\alpha)\\
j - j_0 = -(i'-i_0)\sin(\alpha) + (j'-j_0)\cos(\alpha)
\end{array}
\]
Il programma che realizza questa trasformazione è il
seguente dove abbiamo usato le variabili ip,jp per denotare $i'$ e $j'$.
function y = ruota(x, p, ang)
%
ruota un'immagine data dalla matrice x attorno al pixel p di un angolo ang
in senso antiorario
m = size(x)(1);
n = size(x)(2);
i0 = p(1); j0 = p(2);
for ip = 1 : m
for jp = 1 : n
%
seleziona il pixel di posizione (ip,jp) dell'immagine ruotata
i = round(i0+(ip-i0)*cos(ang)+(jp-j0)*sin(ang));
%
calcola il pixel di posizione (i,j) dell'immagine di provenienza
j = round(j0-(ip-i0)*sin(ang)+(jp-j0)*cos(ang));
if(i>0
&& i<=m && j>0
&& j<=n)
%
se il pixel di provenienza sta nel supporto
dell'immagine
y(ip,jp) = x(i,j);
%
prende il valore dell'immagine
else
y(ip,jp) = 0;
%
altrimenti prende il valore nullo (nero)
endif
endfor
endfor
endfunction
Ecco il risultato che si ottiene con angolo = 1 radiante

a partire da un'immagine originale di cammelli
Sapreste deformare l'immagine in modo che l'angolo di rotazione
sia inversamente proporzionale alla distanza del pixel dal centro
dell'immagine di coordinate $(i_0,j_0)$? Per questo
basta cambiare la parte in cui si calcolano $i$ e $j$ ad esempio
con
s = sqrt((i0-ip)^2 + (j0-jp)^2))/10 + 0.01;
a = 6.28/s;
i = i0 + (ip-i0)*cos(a) + (jp-j0)*sin(a);
j = j0 - (ip-i0)*sin(a) + (jp-j0)*cos(a);
Il numero 0.01 che è stato aggiunto alla variabile s, serve per evitare
situazioni di singolarità nel centro di rotazione. Ecco il
risultato che si ottiene

Per poter applicare la trasformazione ad una immagine fotografica che abbiamo disponibile nel formato PNM si può usare il comando di Octave
A=loadimage("nomefile.pnm");
che costruisce una matrice A con i valori numerici dell'immagine.
Un comando diverso che svolge la stessa funzione è
A=imread("nomefile.pnm");
Una semplice function che legge i dati da un file pgm o ppm e li assegna ad una matrice è riportata di seguito
function a= leggifoto(nome)
% A = leggifoto("nomefile");
% legge un file pgm o ppm e mette i valori in A
% A ha dimensione mxn se il file e' pgm
% A ha dimensione mxnx3 se il file e' ppm
% il file deve essere di tipo ASCII e non deve avere commenti
fid = fopen (nome, "r");
p=fgetl (fid, 2);
[v,l]=fscanf(fid,"%d");
m=v(2);n=v(1);
if p=="P2"
a=reshape(v(4:m*n+3),n,m)';
elseif p=="P3"
c=reshape(v(4:m*n*3+3),3,n,m);
a=zeros(m,n,3);
x=reshape(c(1,:,:),n,m);
a(:,:,1)=x';
x=reshape(c(2,:,:),n,m);
a(:,:,2)=x';
x=reshape(c(3,:,:),n,m);
a(:,:,3)=x';
endif
fclose (fid);
end
Il file deve essere di tipo ASCII, pgm o ppm. Nel primo caso in uscita è data una matrice $m\times n$ con i valori dei pixel dell'immagine;
nel secondo caso è data una matrice $m\times n\times 3$ con i valori dei pixel nei tre canali del rosso, verde e blu. In tutte e due i casi il comando imagesc(A) visualizza il contenuto della matrice come immagine.
Naturalmente la presenza dei due cicli for annidati nella function ruota1 rallenta molto
l'esecuzione del programma. È possibile però dare una
versione vettorizzata di questa function.
L'idea si basa su questa proprietà del linguaggio Octave:
se u
è un vettore di m componenti e se v è un vettore di n
componenti intere comprese tra 1 e m, allora w=u(v) è il vettore di n
componenti date da w(i)=u(v(i)). Ad esempio, se u=[4 5 6 7] e v=[1 1 2 2 2 4]
allora u(v) è il vettore [4 4 5 5 5 7]. La proprietà vale
anche per matrici U e V se queste le interpretiamo come vettori ottenuti giustapponendo le colonne una dopo l'altra. Infatti, se U è $m\times n$ e
V è
$p\times q$ con elementi compresi tra 1 e $mn$, allora W=U(V) è la
matrice $p\times q$ tale che W(i,j)=U(h,k), dove h e k si ottengono
dalla decomposizione di V(i,j)=m(k-1)+h. Tale decomposizione mette in corrispondenza la coppia (h,k) con m(k-1)+h, quindi l'ordinamento indotto sulle coppie (h,k) è quello per colonne: (1,1), (2,1), ..., (m,1), (1,2),..., (m,n).
Ad esempio, vale
11 44 77
4 9
44 99
U =
22 55 88 V = 9 1
U(V) = 99 11
33 66 99
5 6
55 66
Legata a questa proprietà c'è l'istruzione vec che
trasforma una matrice in un vettore. Infatti v=vec(A) dà un
vettore v tale che v(q)=A(h,k) con q=m(k-1)+h, dove A è matrice
m×m. Il vettore v si ottiene giustapponendo le colonne di
A. L'operazione inversa la svolge il comando A=reshape(v,m,n).
Un possibile modo per svolgere la rotazione di una
immagine senza usare cicli for procede con i seguenti passi. L'obiettivo è descrivere in modo compatto la trasformazione
$(i',j') \to (i,j)$ dove $(i,j)$ è la generica coppia di indici del generico pixel dell'immagine di partenza e $(i',j')$ è la
corrispondente coppia di indici del pixel dell'immagine trasformata.
-1- si costruisce una matrice V di dimensione $2\times mn$ che ha per colonne tutte le coppie
$(i, j)$ con $i=1,\ldots,m$, $j=1,\ldots,n$. Come ordinamento, fissiamo prima l'indice di colonna $j$ e poi facciamo scorrere l'indice di riga $i$, cioè procediamo per colonne nello scandire le coordinate dell'immagine.
-2- Costruiamo la matrice W $2\times; mn$ che nella generica colonna $k$-esima ha gli indici $(i,j)$ dove la $k$-esima colonna
di V ha gli indici $(i',j')$. nel caso della rotazione attorno a (i0,j0) di un angolo alfa, basta costruire la matrice
R=[cos(alfa), sin(alfa);-sin(alfa) cos(alfa)]
e calcolare W=[i0;j0]+R(V-[i0;j0]). Questo implementa in modo vettoriale le formule di rotazione, cioè
abbiamo descritto la rotazione come trasformazione di $(i,j)$ in $(i',j')$ in modo compatto come V $\to$ W. Naturalmente
poiché i nostri pixel hanno coordinate intere dobbiamo arrotondare il risultato di W alla parte intera.
-3- Per realizzare la trasformazione dei pixel dell'immagine avendo a disposizione quella delle coordinate basta procedere così.
-3.1- si trasformano le coordinate bidimensionali racchiuse nelle colonne di W in coordinate monodimensionali con
l'ordinamento per colonne, cioè si applica la trasformazione $(i,j)
\to i+(j-1)m$. Per questo si costruisce il vettore
Z=(W(2,:)-1)*m + W(1,:).
-3.2- si dimensiona Z a matrice m×n come Z=reshape(W,m,n). La matrice Z avrà come elemento di posto $(i',j')$ il valore
$i+(j-1)m$ dove ricordiamo che $(i',j')$ è il trasformato di $(i,j)$
-3.3- si calcola infine Y=X(Z)
Se applichiamo il metodo così come l'abbiamo descritto è molto probabile che Octave ci segnali degli errori in esecuzione. Il problema
è che dopo la rotazione alcune coordinate di pixel possono
cadere fuori dal supporto dell'immagine, cioè i loro valori
numerici possono non appartenere ai segmenti [1:m] per le righe e
[1:n] per le colonne. In questo caso Octave ci segnalerebbe un
errore. Occorre allora rimediare all'inconveniente modificando in modo opportuno il
punto 3. Allora si procede così
-3.00- individuiamo i valori degli indici che cadono fuori del supporto
[1,m]×[1,n];
per questo trasformiamo in 0 tutti i valori di W minori o uguali a 0,
trasformiamo in $m+1$ gli indici della prima riga di W maggiori di $m$,
e trasformiamo in $n+1$ gli indici della seconda riga di W maggiori di $n$;
-3.01- l'immagine X di dimensione m×n la bordiamo di zeri
copiandola in una matrice XX di dimensioni $(m+2)\times(n+2)$, allo
stesso tempo incrementiamo i valori di W di uno. In tal modo gli
indici di riga o di colonna uguali a 1 individuano punti fuori del
supporto e corrisponderanno a elementi (pixel) della cornice aggiunta
all'immagine. Analogamente, indici di riga uguali a $m+2$ o di colonna
uguali a $n+2$ individuano punti fuori dal supporto che corrisponderanno
a elementi della cornice aggiunta all'immagine. Si pone X=XX
Il programma che si ottiene è il seguente
function Y = ruota2(X, p, ang)
% ruota l'immagine X attorno a p di un angolo ang
% in modo antiorario
m = size(X,1); n=size(X,2);
i0 = p(1); j0=p(2);
vi = vec([1:m]'*ones(1,n))';
vj = vec(ones(m,1)*[1:n])';
% trasforma
V = [vi-i0;vj-j0];
R = [cos(ang) sin(ang);-sin(ang) cos(ang)];
W = R*V + [i0;j0]*ones(1,n*m);
W = round(W);
% controllo delle coordinate fuori dal supporto
W = max(W,0);
W(1,:)=min(W(1,:),m+1);
W(2,:)=min(W(2,:),n+1);
W = W + 1;
XX = zeros(m + 2, n + 2);
XX(2:m+1, 2:n+1) = X;
Z = (m + 2)*(W(2,:)-1) + W(1,:);
ZZ = reshape(Z,m,n);
Y = XX(ZZ);
endfunction
La rotazione è una semplice trasformazione di coordinate. È possibile costruire trasformazioni arbitrarie, basta dare spazio alla fantasia. Una trasformazione interessante è quella che sposta un pixel in una direzione a caso di una quantita' a caso compresa tra tra 0 e 3.
Un insieme di trasformazioni interessanti si ottiene usando funzioni di variabile complessa. Questo lo vediamo tra poco. Un'altro esempio interessante che richiede un po' di modellazione matematica è il caso di immagini anamorfiche ottenute mediante riflessioni su specchi non piani.
Esempio. Immagini anamorfiche. Un modo interessante
per applicare deformazioni ad una immagine assegnata consiste nel
fare riflettere l'immagine originale su uno specchio cilindrico o su
una sfera. Ad esempio, supponete di avere uno specchio cilindrico
posto su un piano orizzontale $P$ e considerate un generico raggio che
parte dal vostro occhio, colpisce la superficie del cilindro, viene
riflesso e interseca il piano orizzontale $P$ in un punto $p$. Lo stesso
raggio se non è riflesso, prosegue oltre il cilindro e
interseca in un punto $q$ un piano obliquo $Q$ posto dietro il cilindro.
Sapreste scrivere le relazioni che legano le coordinate di $p$ e di $q$ rispettivamente nel piano $P$ e nel piano $Q$?
Se siete in grado di fare questo, potete modificare il programma ruota1 o il programma ruota2 in modo che
data un'immagine generica genera una immagine anamorfica che può
essere "riletta" fisicamente riflettendola in uno specchio
cilindrico.
Esercizi un po' più semplici sono i seguenti:
Esercizio 1. Simulare come viene trasformata una fotografia se viene arrotolata attorno ad un semicilindro di altezza pari ad una delle sue dimensioni e i suoi punti vengono proiettati ortogonalmente su AB come in figura dove x è il generico punto dell'immagine e y quello dell'immagine trasformata.

Esercizio 2. Simulare la trasformazione inversa dell'esercizio 1. Cioè, data la foto nel piano generare la foto sul cilindro.
Esercizio 3. Con riferimento all'esercizio 1 simulare come viene trasformata una fotografia se il generico punto x dell'immagine originale viene
trasformato in y come in figura.

Esercizio 4. Simulare la trasformazione inversa dell'esercizio 3. Cioè, data la foto blu nel piano generare la foto sul cilindro.
Esercizio 5. Data una immagine $m\times n$ e preso il pixel centrale
$(i_0,j_0)$ si deformi l'immagine col cambio di coordinate $(i,j)\to(i',j')$
dove $i'=i_0+m((i-i_0)/m)^3$, $j'=j_0+n((j-j_0)/n)^3$.
Esercizio 6. Data una immagine $m\times n$ e preso il pixel centrale
$(i_0,j_0)$ si deformi l'immagine col cambio di coordinate inverso a quello dell'esercizio 5.
Esercizio 7. data una immagine $m\times n$ e preso il pixel centrale
$(i_0,j_0)$ si deformi l'immagine col cambio di coordinate $(i,j)\to(i',j')$
dove $(i',j')^T=(i_0,j_0)^T + A(i-i_0,j-j_0)^T$ dove $A$ è la matrice di elementi $a_{i,j}$ per $i,j=1,2$ di valore assoluto scelto a caso tra zero e 1.
Esercizio 8. Data una immagine $m\times n$ e preso il pixel centrale
$(i_0,j_0)$ si deformi l'immagine col cambio di coordinate $(i,j)\to(i',j')$
dove $i'=i_0+m\sqrt 2\cos((i-i_0)/m))\sin((j-j_0)/n)$, $j'=j_0+n*\cos((j-j_0)/n))$.
Compito: Svolgere uno degli 8 esercizi precedenti.
2.1-Manipolazioni
geometriche con funzioni di variabile complessa.
Interessanti trasformazioni si ottengono utilizzando funzioni di
variabile complessa. Data un'immagine costituita dall'insieme dei
pixel $a(i,j)$, per $i=1,\ldots,m$, $j=1,\ldots,n$ associamo alla coppia $(i,j)$ un
numero complesso $z=z(i,j)$, ad esempio $z=(j-j_0)h +
{\bf i}(i-i_0)h$ dove abbiamo denotato con {\bf i}
l'unità immaginaria tale che ${\bf i}^2=-1$, e dove
abbiamo scelto $i_0,j_0$ e $h$ a nostro piacere.
Oltre all'applicazione $(i,j)\to(i,j)$ consideriamo l'applicazione
"inversa" $z(i,j)\to(i,j)$ tale che $j$ è la parte
intera di Re$(z)/h +j_0$, mentre $i$ è la parte intera
di Im$(z)/h+i_0$, dove abbiamo indicato con Re(.) e Im(.) la
parte reale e la parte immaginaria di un numero complesso.
Consideriamo poi una funzione di variabile complessa $y=f(z)$, ad
esempio $f(z)=z^2/|z|$, e costruiamo questa trasformazione
tra coppie di interi $(i',j')$ e $(i,j)$
$(i,j)\to z(i,j)$, $w=f(z)$,
$w\to(i',j')$
Costruiamo l'immagine che nel pixel di coordinate
$(i,j)$ ha il valore $a(i',j')$ se $(i',j')$ appartiene a $[1,m]\times[1,n]$, ha
il valore 0 altrimenti. Come è fatta l'immagine deformata in
questo modo?
Cosa accade con semplici funzioni quali $f(z)=zt$, se
$t$ è un numero complesso di modulo 1, oppure se $t$ è un
numero reale positivo?
Cosa accade con funzioni più
complesse quali $f(z)=z(z/|z|)^k$, per $k$ intero? Oppure con
$f(z)=z-(z^3-1)/(2z^2)$?
Questa e una traccia di programma Octave per deformare immagini
function Y = complextransform(X)
m = size(X)(1);
n = size(X)(2);
h = 2/max(m,n);
Y = zeros(m,n);
i0 = round(m/2); j0 = round(n/2);
% scandisco supporto della foto trasformata
for ip = 1 : m
for jp = 1 : n
% calcolo il numero complesso corrispondente
z = (jp-j0)*h + I*(ip-i0)*h;
% trasformo all'indietro
if abs(z) != 0
w=z*(z/abs(z))^2;
else
w = 0;
endif
% calcolo le coordinate del pixel corrispondente a w
i = round(i0+imag(w)/h);
j = round(j0+real(w)/h);
% assegno il colore
if(1<=i&& i<=m && 1 <=j &&
j<=n)
Y(ip,jp) = X(i,j);
else
Y(ip,jp)=0;
endif
endfor
endfor
endfunction
Ecco alcuni esempi ottenuti con varie funzioni




Di seguito si riporta una function per costruire immagini ottenute con trasformazioni
di variabile complessa evitando cicli for. La function è ottenuta modificando leggermente la function ruota2.
function Y = complextransform2(X, p)
% trasforma l'immagine X mediante funzione di variabile
% complessa
% X: immagine
% p=[i0,j0]: coordinate del pixel in cui e' messa l'origine
% nel piano complesso
% il programma e' un adattamento della function ruota2
m = size(X,1); n=size(X,2);
i0 = p(1); j0=p(2);
vi = vec([1:m]'*ones(1,n))';
vj = vec(ones(m,1)*[1:n])';
%%%%%%% trasforma
V = [vi-i0;vj-j0];
z=V(2,:)+I*V(1,:);
z=z.*(z./(abs(z)+1.0e-16)).^2; % funzione
W=zeros(2,m*n);
W(2,:)=real(z);W(1,:)=imag(z);
W = round(W) + [i0;j0]*ones(1,n*m);
%%%%%%%%
% controllo delle coordinate fuori dal supporto
W = max(W,0);
W(1,:)=min(W(1,:),m+1);
W(2,:)=min(W(2,:),n+1);
W = W + 1;
XX = zeros(m + 2, n + 2);
XX(2:m+1, 2:n+1) = X;
Z = (m + 2)*(W(2,:)-1) + W(1,:);
ZZ = reshape(Z,m,n);
Y = XX(ZZ);
endfunction
Esercizio 1'. Simulare l'azione di una lente di ingrandimento
trasformando una immagine in modo da ingrandirne una parte con
continuità, e quindi senza strappi, lasciando la parte rimanente
inalterata.
Le seguenti immagini sono state create da studenti del
corso dell'aa. 2008-2009.



Esercizio 2'. Realizzare la rotazione di una immagine usando una
opportuna funzione di variabile complessa.
Esercizio 3'. Realizzare la trasformazione di una immagine usando la
funzione esponenziale e la funzione logaritmo.
Esercizio 4'. Realizzare la trasformazione di una immagine usando la
funzione seno e la funzione coseno.
Esercizio 5'. Realizzare la trasformazione di una immagine usando
la trasformata di Cayley $z \to (1-z)/(1+z)$.
Esercizio 6'. Realizzare la trasformazione di una immagine usando la
funzione $z\to (z+1/z)/2$.
Esercizio 7'. Realizzare la trasformazione di una immagine usando come trasformazione inversa separatamente una, due e tre
iterazioni del metodo di
Newton applicato a $x^3-1$.
Esercizio 8'. Realizzare la trasformazione di una immagine usando come trasformazione inversa separatamente una, due e tre
iterazioni del metodo di
Newton applicato a $x^4-1$.
3-Decomposizione spettrale,
filtraggio e compressione.
Sia $n$ un intero positivo che supponiamo per semplicità pari,
cioè $n=2m$. Consideriamo i vettori $c^{(j)}$, $j=0,1,\ldots,m$,
$s^{(j)}$, $j=1,\ldots,m-1$, di $n$ componenti definiti da
$c^{(j)}_i=\cos(2ij\pi/n)$,
$s^{(j)}_i=\sin(2ij\pi/n)$, $i=0,\ldots,n-1$.
Ciascuno di questi vettori si ottiene
calcolando rispettivamente le funzioni $\cos(jx)$ e $\sin(jx)$ nei punti
$x_i=2i\pi/n$, $i=0,1,\ldots,n-1$. Come dicono gli ingegneri i
vettori $s^{(j)}$ e $c^{(j)}$ sono i campionamenti delle
funzioni $\cos(jx)$ e $\sin(jx)$ nei nodi $x_i$. Quindi i vettori
$c^{(j)}$ e $s^{(j)}$ rappresentano in termini discreti le funzioni
$cos(jx)$ e $sin(jx)$ che hanno periodo $2\pi/j$ e quindi frequenza $j/2\pi$.
Qui sotto si riportano graficamente i vettori $s^{(1)}$, $s^{(2)}$,
$s^{(3)}$, $s^{(4)}$.




Si può verificare che gli $n$ vettori così costruiti sono
linearmente indipendenti per cui ogni vettore $v=(v_i)$ di $n$ componenti
può essere rappresentato nella base costituita da questi vettori speciali. Vale cioè
$v=a_0c^{((0)}+ (a_1c^{(1)} +
b_1s^{(1)}) + (a_2c^{(2)} +
b_2s^{(2)})
+ \cdots +
(a_{m-1}c^{(m-1)} + b_{m-1}s^{(m-1)}) + a_mc^{(m)}$
Nel caso di $n$ dispari, cioè $n=2m-1$ i vettori $c^{(j)}$,
$i=0,...,m-1$, $s^{(j)}$, $j=1,\ldots,m$, sono ancora linearmente indipendenti e vale una espressione analoga alla precedente, cioè
$v=a_0c^{(0)} + (a_1c^{(1)} +
b_1s^{(1)})
+ (a_2c^{(2)} +
b_2s^{(2)}) + \cdots +
(a_{m-1}c^{(m-1)} + b_{m-1}s^{(m-1)})
$
I coefficienti $a_i$ e $b_i$ possono
essere calcolati, a partire dalle componenti di $v$ mediante
l'algoritmo FFT (Fast Fourier Transform) della trasformata veloce
discreta di Fourier del quale esistono numerose implementazioni in
diversi linguaggi di programmazione. Infatti, se $v$ è reale e
$u=$fft$(v)$, cioè
$
u_i=(1/n)\sum_j(\cos(2\pi ij/n)+{\bf i}\sin(2\pi ij/n))v_j,
$
con $\bf i$ unità immaginaria, vale la seguente proprietà
se $n=2m$ allora $u=[u_0, u_2, \ldots , u_m, u_{m+1},
\hat u_m, \ldots, \hat u_1]$,
se $n=2m-1$ allora
$u=[u_0, u_1, \ldots, u_m,
\hat u_m, \ldots, \hat u_1]$,
dove $u_0, u_{m-1}$ sono reali e $\hat u_i$ indica il coniugato del numero complesso
$u_i$, inoltre
$a_i=2$Re$(u_i)$
$b_i=-2$Im$(u_i)$
La rappresentazione di un vettore nella base speciale di seni e di
coseni permette di considerare un vettore generico come somma di
vettori "oscillanti" con frequenze multiple intere della frequenza
$1/(2\pi) e di
ampiezze date da
$A_j=(a_j^2+b_j^2)^{1/2}=2|u_j|$.
Infatti, mediante note identità trigonometriche, la rappresentazione data si può scrivere come
\[
v_i=a_0+A_1 \cos(i \frac{2\pi}n + B_1) +
A_2
\cos(2i \frac{2\pi}n + B_2) +
A_3
\cos(3i \frac{2\pi}n + B_3) + \cdots + A_{m-1} \cos((m-1)i \frac{2\pi}n + B_{m-1}) +
A_m\cos(m i \frac{2\pi}n+B_m)
\]
Questa trasformazione è molto usata dagli ingegneri per
filtrare segnali. Infatti la decomposizione in termini di funzioni
trigonometriche elementari (decomposizione spettrale) ci permette di
conoscere le ampiezze $A_j$ e le fasi $B_j$ con cui ogni singola
frequenza elementare compare nel segnale. Con questa
informazione possiamo fare manipolazioni di segnali molto efficaci,
quali amplificare o ridurre le tonalità acute o gravi di un
suono rappresentato in forma digitale mediante il vettore $v$.
Si veda il sito http://www.westga.edu/~jhasbun/osp/Fourier.htm
per un grazioso strumento legato a queste rappresentazioni.
Ad
esempio si può costruire un nuovo vettore $w$ ottenuto
amplificando le componenti in "bassa frequenza" sostituendo
ad esempio i valori $A_i$ con $2A_i$ se $i$ è minore di $n/4$.
Analogamente possiamo amplificare o attenuare le alte o le medie
frequenze e trasformare il vettore originale in diversi modi. Se il
vettore rappresenta un segnale acustico, ad esempio un brano di
musica, le operazioni descritte hanno l'effetto analogo a quello che
si ottiene regolando i toni in un impianto hifi. Questo tipo di
manipolazione numerica è esattamente quella che svolgono
certe applicazioni che riproducono musica digitale
su di un pc.
Si osserva che le quantità $a_j$ e $b_j$
sono relative alla componente in
frequenza $j$-esima del segnale. Inoltre esse sono determinate dalla parte reale ed immaginaria delle componenti $u_j$ del vettore $u=$fft$(v)$.
Evidenziamo questa relazione, riportando un vettore di interi in cui
si mette in luce la dipendenza della frequenza dalla componente del vettore trasformato. Si descrive il caso $n=16$ e $n=17$
Caso $n=16$ [0 1 2 3 4 5 6 7 8 7 6 5 4 3 2 1]
Caso $n=17$ [0 1 2 3 4 5 6 7 8 8 7 6 5 4 3 2 1]
Se ad esempio volessimo rimuovere da un vettore $v$ di 16 componenti
le componenti in frequenza relative alle frequenze 5, 6, 7, 8, dovremmo operare nel seguente modo:
-1- si calcola $u=$fft$(v)$
-2- si considera il vettore filtro $f=[1 1 1 1 1 0 0 0 0 0 0 0 1 1 1 1]$
-3- si moltiplica componente a componente $u$ con $f$ e si ottiene $z$ (nella sintassi di Octave
z = u.*f)
-4- si antitrasforma $z$ e si ottiene $w = $ifft$(z)$
dove ifft è la trasformata discreta inversa di Fourier. Il
vettore $w$ fornisce il segnale filtrato. Se ad esempio volessimo
ridurre di un fattore 1/2 l'ampiezza delle componenti in frequenza
5,6, e annullare le componenti in frequenza 7 e 8 il vettore filtro
sarebbe
f=[1 1 1 1 1 1/2 1/2 0 0 0 1/2 1/2 1 1 1 1]
Octave ha la funzione y=fft(x) che fornisce la trasformata discreta di Fourier y del vettore x. Inoltre esiste la funzione x=ifft(y) che fornisce la trasformata discreta inversa.
Diamo ora un esempio di filtraggio di un segnale. Sia $n=512$ il numero di punti di campionamento in cui si divide l'intervallo $[0,2\pi]$. Poniamo h=2pi/n e
x=[0:h:2*pi-h]. Scegliamo come funzione
$y=\sin(x)^2+0.1\cos(4x^2-x+1)+0.05\sin(100x)$
che ha grafico

Quindi, usando Octave scriviamo
n=512; h=2*pi/n; x=[0:h:2*pi-h];
y=sin(x).^2 + 0.1*coz(4*x.^2-x+1) + 0.05*sin(100*x);
plot(y);
Il grafico che otteniamo ha delle oscillazioni molto fitte "in alta frequenza".
Per rinuoverle procediamo nel modo seguente. Si crea un filtro che azzera le componenti in frequenza più alte come segue
f=ones(1,n);
m=n/2+1;
f(m-200:m+200)=0;
e adesso filtriamo
w=ifft(fft(y).*f);
w=real(w);
plot(w);
e otteniamo il grafico
 Nel caso delle immagini si possono fare filtraggi analoghi agendo
separatamente sui vettori colonna e sui vettori riga di
un'immagine. Si supponga di avere una matrice $A$ $m\times n$ che
contiene una immagine. Per rimuovere le alte frequenze (dettagli
minuscoli) in $A$ basta calcolare la trasformata discreta di Fourier
delle righe e la trasformata discreta delle colonne di $A$, moltiplicare
ciascuna colonna del risultato componente a componente con un vettore
filtro, fare la stessa cosa sulle righe e antitrasformare.
Nel caso delle immagini si possono fare filtraggi analoghi agendo
separatamente sui vettori colonna e sui vettori riga di
un'immagine. Si supponga di avere una matrice $A$ $m\times n$ che
contiene una immagine. Per rimuovere le alte frequenze (dettagli
minuscoli) in $A$ basta calcolare la trasformata discreta di Fourier
delle righe e la trasformata discreta delle colonne di $A$, moltiplicare
ciascuna colonna del risultato componente a componente con un vettore
filtro, fare la stessa cosa sulle righe e antitrasformare.
Octave ha le funzioni fft2 e ifft2 che svolgono la trasformata discreta diretta e inversa delle righe e delle colonne di una matrice.
Una function di filtraggio di immagini in Octave, che rimuove le frequenze alte dall'immagine è la seguente.
function B=filtra(A)
m = size(A)(1); n = size(A)(2);
% calcolo fft di righe e colonne
B = fft2(A);
% filtro le righe
k = floor((m-1)/2)
v = ones(1,k);
v(k-70:k) = 0;
if(mod(m,2) == 0) % caso m pari: [0 1 2 3 4 3 2 1]
f1 = [1,v,0,v(k:-1:1)];
else % caso m dispari: [0 1 2 3 3 2 1]
f1 = [1,v,v(k:-1:1)];
endif
% filtro per le colonne
k = floor((n-1)/2)
v = ones(1,k);
v(k-70:k) = 0;
if(mod(n,2) == 0) % caso n pari: [0 1 2 3 4 3 2 1]
f2 = [1,v,0,v(k:-1:1)];
else % caso n dispari: [0 1 2 3 3 2 1]
f2 = [1,v,v(k:-1:1)];
endif
% filtro e antitrasformo
B = ifft2(diag(f1)*B*diag(f2));
B = real(B); % tolgo eventuale roundoff immaginario
B = max(B,0);% riporto i valori nel range 0--255
B = min(B,255);
B = round(B);
endfunction
Si noti la simmetria di un filtro data dal fatto che il vettore ottenuto
rimuovendo la prima componente di $f$ è simmetrico rispetto al centro.
Si può osservare che se $v$ è reale allora il vettore
$u$ è tale che $u_0$ e $u_{n/2+1}$ sono reali
mentre $u_j$ è il complesso coniugato di $u_{n-j}$.
Per cui, affinché un filtro $f$ mantenga la realtà del
segnale filtrato, occorre che $f$ sia ''simmetrico'' nel senso che
$f_j=f_{n-j}$, $j=1,\ldots,n/2-1$. Basta quindi definire
il filtro in $f_0,\ldots,f_m$.
Le seguenti tre immagini riportano il caso di una foto originale a cui
è stato aggiunto del rumore dato da una grana
sottile. L'immagine rumorosa è stata filtrata con la function
filtra rimuovendo le componenti in alta frequenza. Il rumore aggiunto è
stato calcolato con la formula
S=2*pi*[0:m-1]'*(250*ones(1,n)+50*rand(1,n))/m;
T=[0:n-1]'*(250*ones(1,m)+50*rand(1,m))*2*pi/m;
R=sin(S)+sin(T)';
X=A+R;
che genera frequenze a caso comprese tra $250/(2\pi)$ e $255/(2\pi)$ sia sulle righe che sulle colonne.

Foto originale

Foto con rumore

Foto filtrata
Ecco un esempio di immagine ottenuta a
partire dalla fotografia dei cammelli amplificando le alte frequenze.
A sinistra l'immagine filtrata, a destra quella originale. In questo
caso, essendo l'immagine a colori, si è fatto il filtraggio
sulle tre componenti R,G,B. Si puό vedere il maggior dettaglio nei
particolari delle foglie e nei tronchi delle palme.


L'uso di filtri "discontinui" come quelli che rimuovono alcune componenti in frequenza e ne lasciano inalterate delle altre possono creare effetti fastidiosi come echi ripetuti lungo le linee di maggior contrasto. È preferibile usare filtri ottenuti da funzioni continue.
Un filtro ''passa alto'' è dato da
$f_j=1-\cos(2\pi j/n)$, $j=0,\ldots,n/2$
infatti, dal grafico della funzione $1-\cos x$

si vede che il filtro
riduce l'ampiezza delle componenti in bassa frequenza
Mentre un
filtro "passa basso" è
$f_j=1+\cos(2\pi j/n)$, $j=0,\ldots,n/2$
infatti dal grafico della funzione $1+\cos x$

si vede che il filtro riduce l'ampiezza delle componenti in alta frequenza.
Come agisce invece il filtro seguente?
$f_j=1-\cos(3 \pi/2 + 2 \pi j/n)$, $j=0,\ldots,n/2$
Si osservi che il grafico della funzione associata $1-\cos(3 \pi/2+x)$ è

Si osservi che il grafico della funzione associata al filtro l'abbiamo tracciato sull'intervallo $[0,\pi]$. Infatti il numero di componenti di $f$ è
$n/2$ se $n$ è pari e $(n-1)/2$ se $n$ è dispari.
Filtri bassa basso e passa alto si possono più semplicemente costruire mediante combinazioni lineari di pixel evitando l'uso della fft.
Ad esempio una trasformazione che realizza un filtro passa basso e trasforma l'immagine $A$ nell'immagine $B$ è
data da
$b_{i,j} = (a_{i,j} + a_{i+1,j} + a_{i-1,j} +
a_{i,j+1} + a_{i,j-1})/5$
Un filtro passa alto è
$b_{i,j} = 4a_{i,j} - a_{i+1,j} - a_{i-1,j} -
a_{i,j+1} - a_{i,j-1}$
Esercizio 1. Si implementino i filtri passa basso e passa alto mediante trasformata di Fourier discreta.
Esercizio 2. Si implementi il filtro dato da $1-\cos(3\pi/2 + 2\pi j/n)$.
Esercizio 3. Si implementi il filtro dato da $2-\cos(2\pi j/n)$.
Esercizio 4. Si implementi il filtro ottenuto prendendo la potenza $k$-esima, $k=2,3$ dei filtri degli esercizi 1 e 2.
Esercizio 5.
Si implementino i filtri passa alto e passa basso che non usano la trasformata discreta di Fourier.
Esercizio 6.
Si implementi il filtro
$b_{i,j} = 4a_{i,j} - a_{i+1,j} - a_{i-1,j} -
a_{i,j+1} - a_{i,j-1}$
Esercizio 7.
Si implementi il filtro
$b_{i,j} = 5a_{i,j} - a_{i+1,j} - a_{i-1,j} -
a_{i,j+1} - a_{i,j-1}$
Esercizio 8. Si implementi un filtro che selezioni una banda assegnata di frequenze.
La stessa tecnica di filtraggio può essere
utilizzata per comprimere un'immagine. Questo avviene memorizzando
solamente i valori delle ampiezze che corrispondono alle frequenze
più basse e si basa sul fatto che generalmente le "alte
frequenze", cioè la ricchezza di dettagli minuscoli, non
sono presenti in tutte le parti di una immagine. Quindi decomponendo
un'immagine in porzioni più piccole ad esempio $8\times 8$ pixel, e
calcolando la rappresentazione spettrale di queste sotto immagini, è
possibile rappresentarle in modo abbastanza fedele memorizzando solo
le basse frequenze nel caso in cui le alte abbiano valori in ampiezza
trascurabili. Questa è l'idea alla base della compressione
JPG.